En het toegezegde vervolg;
Een bouwproject van de laatste weken en inmiddels 6 dagen geleden de eerste vlucht en bijna crash gehad.
Helaas weinig foto's van de bouw waarom..... ja daar kan ik een simpel antwoord op geven. Het is bij multicopters niet zoals bij modelbouw dat alles in kleine stapjes gaat en er dus veel foto momenten zijn. Je krijgt een pakket thuis en dat sleutel je binnen enkele uren (het platform zelf) in elkaar. Geen "rocket science" en bijna plug & play. Daarna begint de volgende wedstrijd en volgt er naar gelang de wensen een klein of groot hoopje elektronica.
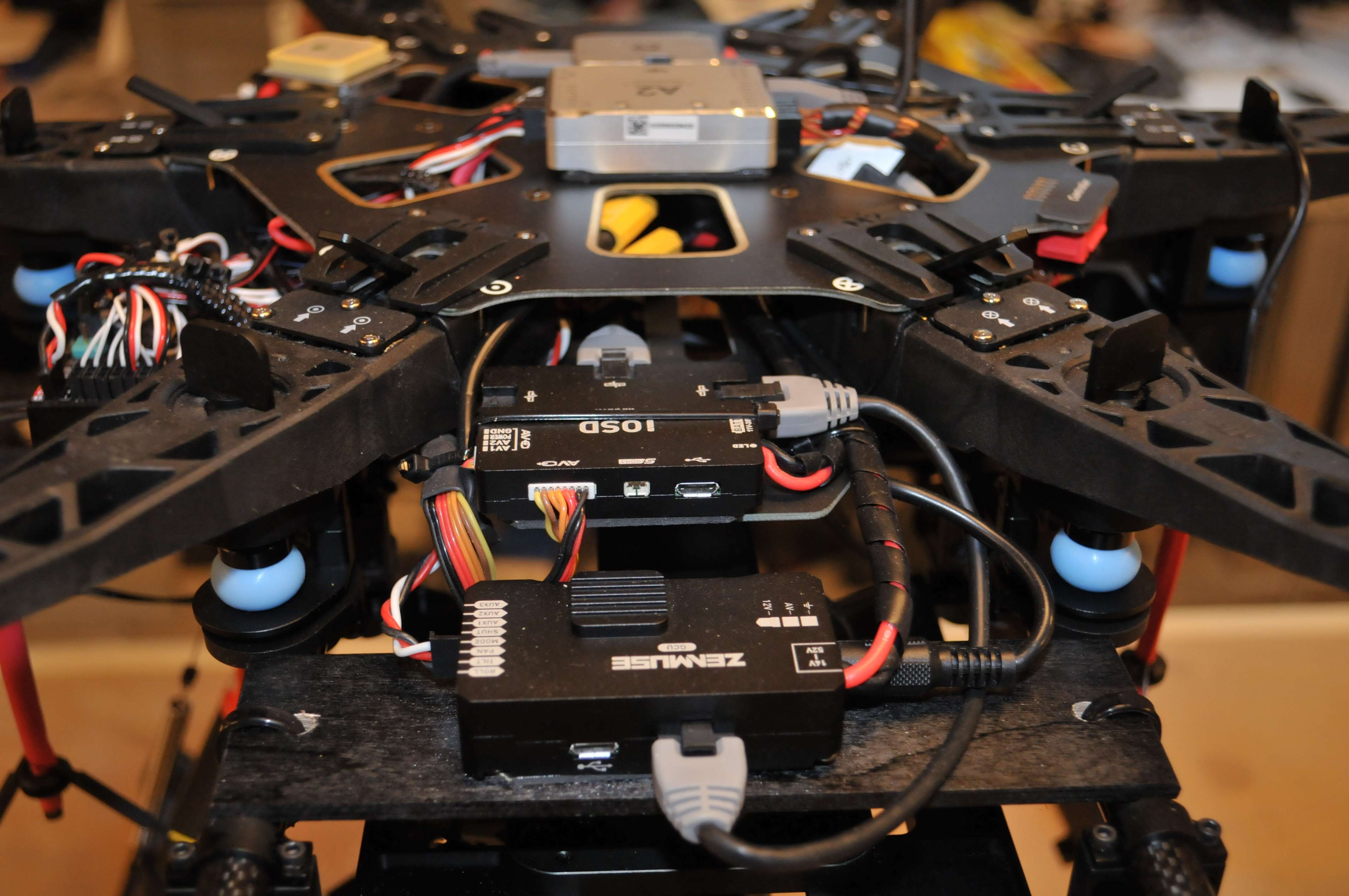
Deze S800 was voor mij bedoeld om nu eens op een betere manier te kunnen filmen en vervolgens dus uitgerust met de gimbal van Zenmusse de Z15. Deze gimbal is uitgerust met een Sony Nex5 camera en kan in alle drie de dimensies worden aangestuurd. Een verder wens was besturing op 3 manieren 1- met de standaard zender, 2- via de laptop met waypoints, 3- via een single joystick. Alle 3 deze systemen zijn nu voorzien en uitgetest, moet zeggen dat het waypoint en single joystick vliegen een beetje vreemd is (moet ontzettend wennen).
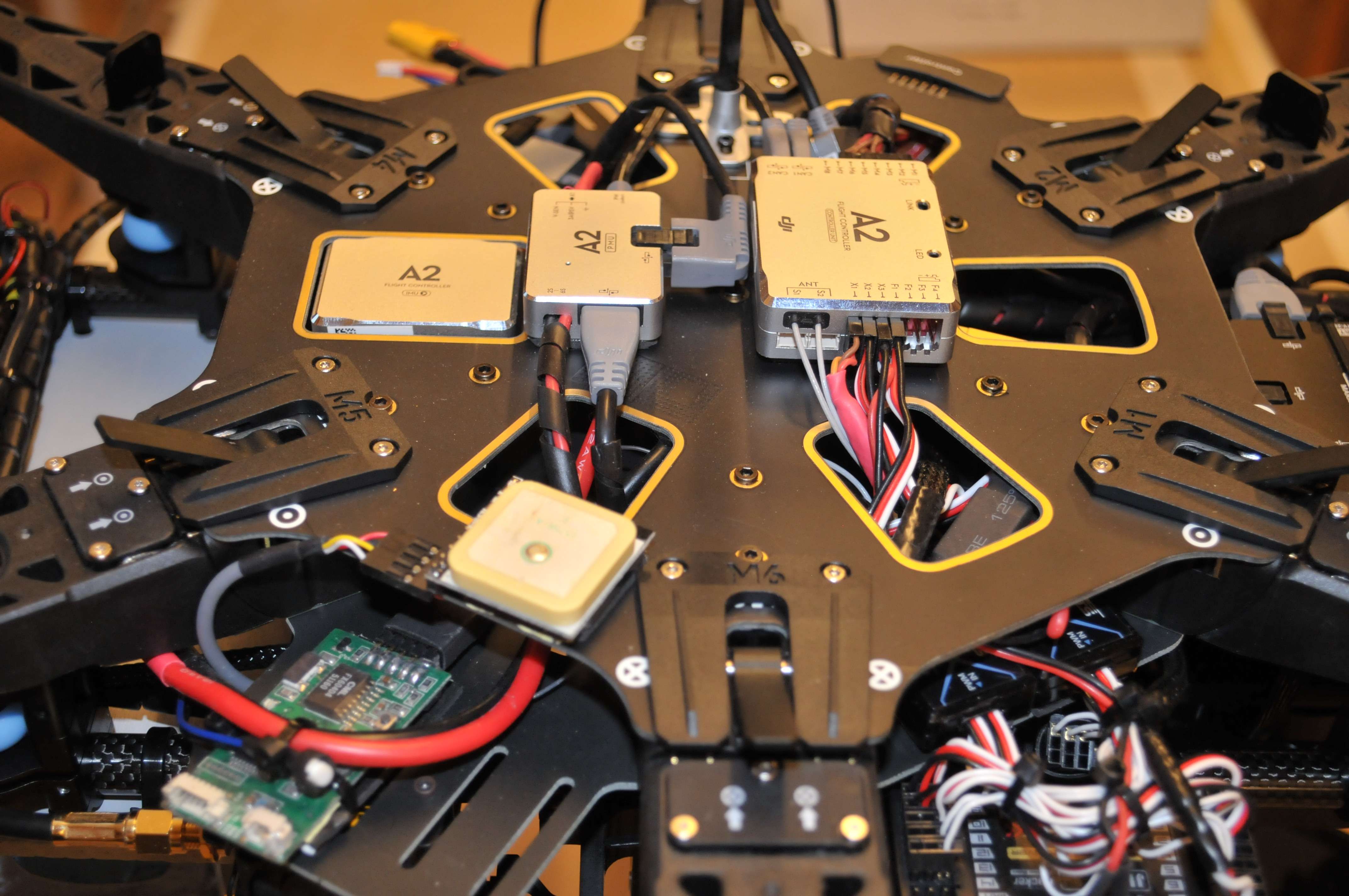
Manier 1 van vliegen behoefd geen uitleg, zender in de hand en vliegen zoals dat ook met andere heli's gaat. Voor manier 2 en 3 is het controle systeem op de multicopter uitgerust met een extra bi-directionele data link op 2,4 Ghz die via een zend/ontvanger op de grond is gelinkt aan een PC waarop een groundstation programma draait. Op de PC zie je een Google map kaart van de omgeving waar je op dat moment staat en kun je waypoints instellen die je vervolgens upload waarna het platform deze zal afvliegen. Hoogte, snelheid en bochtenwerk kunnen per waypoint worden ingesteld tevens zie je in realtime op het scherm waar het platform zich bevind. Ook automatisch opstijgen en landen behoren tot de in te stellen mogelijkheden. Mocht er tijdens het vliegen toch iets mis gaan dan is er altijd een directe mogelijkheid om op de handzender de zaak over te nemen. Afstand die de 2,4 Ghz datalink kan overbruggen is afhankelijk van de omgeving zo'n 5 Km.
Het vliegen van het platform (als er gefilmd gaat worden) gebeurt door 2 piloten. 1 vliegt het platform en de andere bediend via een tweede zender de camera. Deze tweede zender (voor de camera) is via draadloos leraar/leerling systeem verbonden met de zender van de piloot die het platform vliegt. De piloot die de camera bedient krijgt via een beeldverbinding het realtime beeld gepresenteerd in zijn videobril, met andere woorden "what you see is what you get" De gimbal met de camera blijft indien gewenst onafhankelijk van de stand van het platform georiënteerd op het onderwerp. Eerste tests hebben plaatsgevonden en het is gewoon smullen als je dit ziet.
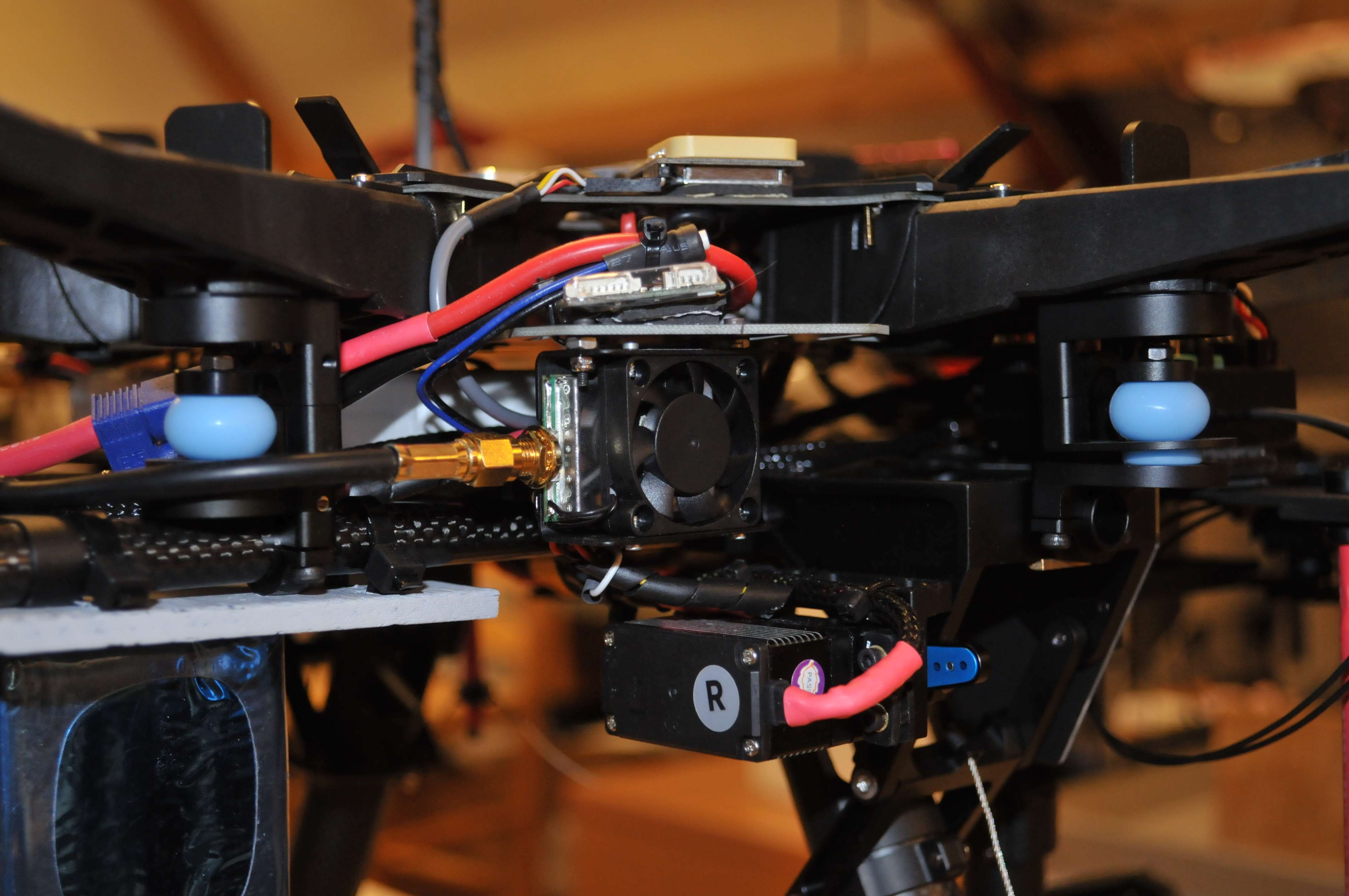
Voor de beeldverbinding is het platform voorzien van een 5,8Ghz zender. Om de verbinding te garanderen staat er op de grond een antenne volgsysteem die gedurende de vlucht 2 richtantennes op de positie van het platform gericht houd. Hoe dit werkt?... op het platform zit een tweede gps systeem die zijn info (coördinaten) via het geluidskanaal van de beeldverbinding naar het volgsysteem doorgeeft. Het volgsysteem weet waar hij staat en berekend met de doorgekregen coördinaten van het platform vliegensvlug de juiste positie en richt vervolgens de antennes naar het juiste punt. Het volgsysteem is uitgerust met twee antennes, een met een grote openingshoek en een met een kleine openingshoek. Beide antennes zijn verbonden met een zogenaamde diversity ontvanger die simpelweg constant bekijkt welk signaal het beste is en deze vervolgens doorgeeft naar de monitor of videobril.
Nog even wat losse info uit de hand, complete platform is voorzien van 6 motoren van ieder 500 Watt en zit nu aan de 9,5Kg totaalgewicht. Op dit moment wordt er nog gevlogen met een 6s lipo van 10.000mA en is de vluchttijd gemiddeld zo'n 10 a 12 minuten. Ik hoop deze tijd nog wat te kunnen verruimen met lipo's die nog in bestelling staan, deze zijn 16.000mA en ik hoop dan op een gemiddelde vluchttijd van zo'n 15 minuten

Het schijnt overigens dat Gens binnenkort voor de multicopter enthousiastelingen uit gaat komen met een 6S 20.000mA lipo, kan het nog gekker?
Nog maar even wat foto's en vervolgens wachten op wat beter en warmer weer (Brrrrrr)



Beste groet Ton.
**overigens voor alle duidelijkheid, de foto's zijn niet bij mij thuis genomen maar op de hobby zolder van een bevriende collega

